
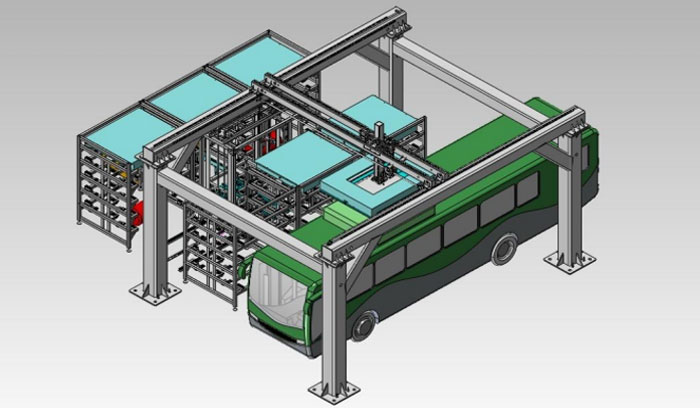



A truss manipulator, also known as a cantilever manipulator or fixture movement platform, is an important device used in the field of automated production. It consists of a main frame and various mechanical arms associated with it, which can carry out various fine operations on industrial production lines.
The operational range of a truss manipulator depends mainly on its structure and the type of arm to be installed. Generally speaking, the truss manipulator can complete the movement and operation in the three-dimensional space, and can carry out the translation, up and down, and back and forth actions in the horizontal, vertical and depth directions. The specific operable range is also related to the structural design of the manipulator, the number of joints and the size of the working space.
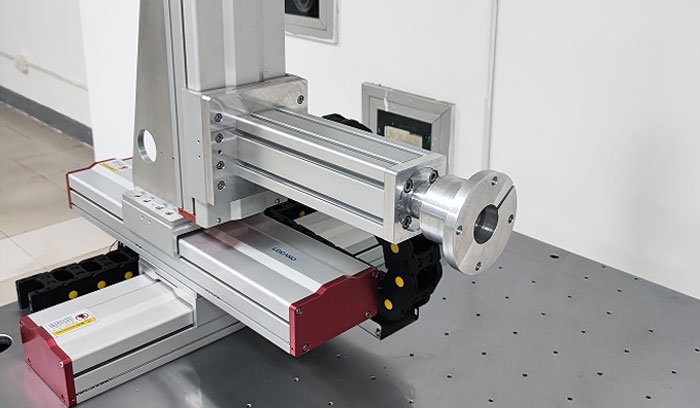
Truss manipulators typically use multi-joint robotic arms, each of which is controlled by a motor, a reducer, and a transmission that can be rotated or telescoped. The multi-joint manipulator arm can make the manipulator have greater flexibility and operable range. Some truss manipulators are also equipped with rotating platforms that allow rotation and positioning of the workpiece.
The accuracy of the truss manipulator mainly depends on the accuracy of its control system and sensors. Modern truss manipulators usually adopt a closed-loop control system, which corrects and controls the position and attitude of the manipulator arm by constantly feeding back the signal of the sensor. Common sensors include encoders, laser rangefinders, vision sensors, etc. These sensors can monitor and measure parameters such as the position, speed and force of the robot arm in real time, so as to achieve high precision control.
The accuracy of truss manipulator is divided into static accuracy and dynamic accuracy. Static accuracy mainly refers to the positioning accuracy of the robot arm in the static state, that is, the ability of the robot arm to accurately stop and reach the predetermined position. Dynamic accuracy refers to the positioning accuracy of the robot arm in the process of movement, that is, the ability of the robot arm to maintain stability and accurate movement under high-speed movement or complex trajectories.
The static accuracy of a truss manipulator is usually in the millimeter or micron level, depending on the structural design of the manipulator arm, the accuracy of the sensor and the performance of the control system. Dynamic accuracy is more demanding than static accuracy, usually in the range of tens of millimeters or less.
In addition to the accuracy of the control system and sensors, the accuracy of the truss manipulator is also related to other factors. For example, the stiffness and stability of the manipulator also have a great impact on the accuracy. The higher stiffness can reduce the vibration and deformation of the manipulator during operation, and improve the accuracy. The lower stiffness may cause the manipulator to displace or vibrate during operation, affecting the accuracy.
In addition, the accuracy of the truss manipulator is also affected by external environmental factors, such as temperature, humidity, noise and so on. Temperature changes can cause the arm's material to expand or contract, affecting accuracy. Humidity and noise may also interfere with the work of the sensor and reduce accuracy.
In general, the operational range and accuracy of the truss manipulator are determined according to the specific design and application requirements. Through reasonable structural design, excellent control system and high-precision sensor, the truss manipulator can achieve a large operating range and high precision on the industrial production line, and meet the needs of automated production in different industries.

No. 3, Guangda Road, Zhitang Industrial Park, Changshu City