The truss part can simply regard the truss as a beam. Because its structure is similar to the structural beam at the side of mechanics, it can make a horizontal comparison between the machine tool truss and the simply supported beam from the perspective of mechanics. It can analyze the truss through the bending moment diagram of the simply supported beam to increase the effect of the manipulator on the truss. We can refer to the following mechanical analysis diagram of the truss manipulator. Truss manipulators have high requirements on machine tools. They are required to have high efficiency and high reliability. As for the selection of truss columns, they should make the truss support stable and also save the overall space of the machine tool. As for most column structures, steel structures are selected.
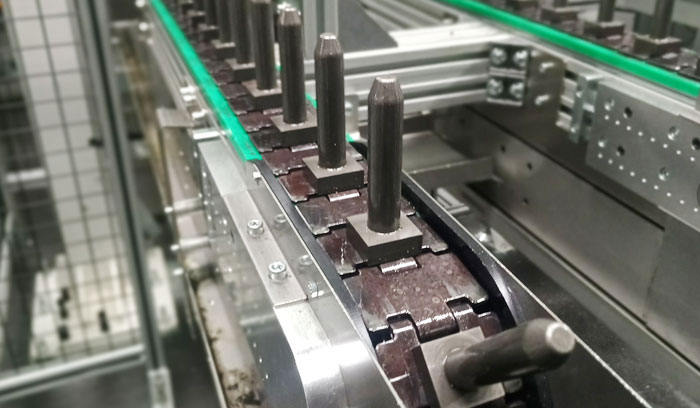
The effect of the truss manipulator is to play a transportation role. It is to move the workpiece between the loading and unloading track and the machine tool, take out the processed parts from the machine tool, and then pick up the processed parts from the track and place them on the machine tool. The first action is to open, grasp, lift and move left and right. There are many plans and methods for the gripper planning of the manipulator, and different planning methods can be selected according to different needs. The following figure is one of the plans made by Pinzhan Automation Equipment Manufacturing (Suzhou) Co., Ltd. for customers.

Mechanical self-locking gripper: This structure is very popular with customers. The mechanical self-locking gripper has a simple structure, but it also makes a messy planning for grasping. In order to avoid falling off when clamping parts, self-locking devices are added. Linkage lever type gripper: we can think of its structure from its title. Linkage lever type gripper uses a mechanical linkage mechanism to clamp and release the gripper through the transmission of linkage and lever. However, this mechanism has a disadvantage, that is, its clamping force is relatively large. Rack and pinion gripper: this mechanism has good transmissibility and fast reaction speed. It controls the gripper through the transmission between gears, and can be broken in speed.
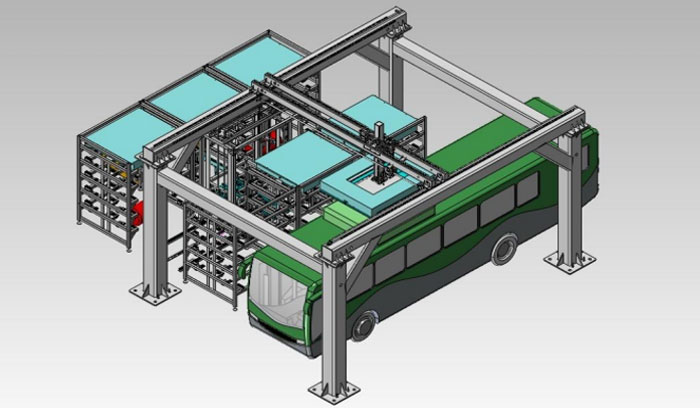
When planning the arm of the manipulator on the truss, it is necessary to consider the load of the manipulator. In the motion, it is necessary to complete the fast motion, but in the mechanism, it is also necessary to be able to bear the force. The manipulator on the machine tool truss generally moves in a straight line, so when considering the arm planning, the hydraulic direct drive manipulator is generally selected. In the selection of the hydraulic cylinder of the manipulator, the diameter of the hydraulic cylinder should be larger, so that the overall strength of the arm is relatively high. The movement of the truss manipulator is the horizontal movement of the manipulator on the truss. After reaching the specified position, the manipulator moves downward, the claw clamps the workpiece, and drives the workpiece to rise, Reverse movement, place the part on the track, and release the paw. During this period, several orientation PLC controls the limiter, respectively when the manipulator stops falling and rising. When the manipulator clamps the part from the machine tool, the next workpiece arrives at the undetermined area. After the manipulator finishes this action, it returns to the position of the part to be processed. The manipulator descends, clamps the part, places the part in the machine tool, the manipulator returns to the initial position, the PLC stops the pulse output, the machine tool performs processing, the manipulator completes the movement, and the truss manipulator does the above movement back and forth.

No. 3, Guangda Road, Zhitang Industrial Park, Changshu City