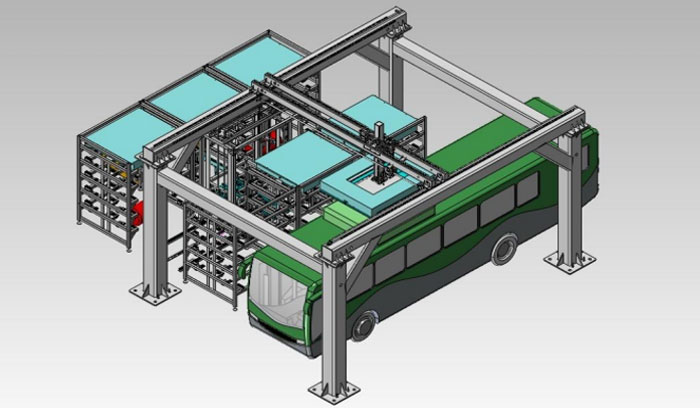
Truss type CNC machine tool loading and unloading manipulator is a rectangular coordinate robot manipulator used for automatic loading and unloading of CNC machine tools. Truss type CNC machine tool manipulator is an automatic equipment that can realize automatic control, repeatable programming, multi-function, multi degree of freedom, and spatial right angle relationship between motion degrees of freedom in industrial applications. The combination of the loading and unloading robot of the truss type machine tool and the numerical control machine tool can realize the automatic grabbing, loading, unloading, clamping, shifting and turning of the workpiece, and changing the sequence of the workpiece in all technological processes, which can greatly save the labor cost and improve the production efficiency.
The automatic loading and unloading of truss manipulator of CNC machine tool is coordinated and controlled by PLC programmable logic controller, and is operated by various hydraulic cylinders and cylinders. Move the workpiece to be processed on the loading and unloading track of the manipulator into the machine tool, take the processed workpiece out of the machine tool after processing, and return it to the loading and unloading track of the manipulator. The whole automatic loading and unloading process includes five parts: workpiece conveying, manipulator picking, chuck loading and unloading, manipulator feeding and sending parts to the next process. The workpiece conveying and sending the parts to the next process are executed in parallel with other parts and NC machining; Truss type manipulator reclaiming and manipulator feeding shall be carried out simultaneously with numerical control processing.
1. Workpiece conveying
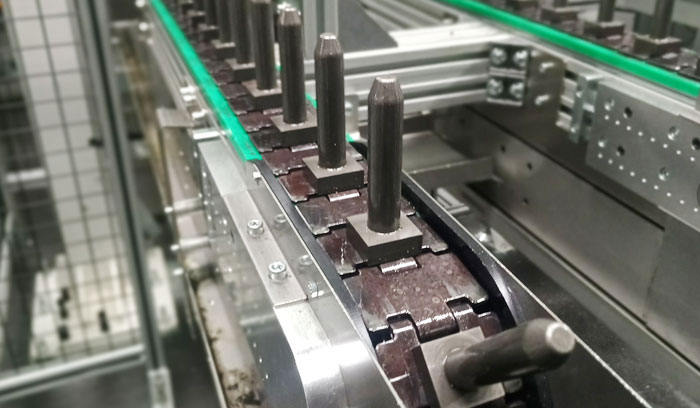
Horizontal conveying, inclined conveying and lifting conveying are adopted. Horizontal conveying can convey different goods, and can adopt different conveying speeds and different conveying forms; The inclined conveying can adjust the inclined angle. The use of patterned conveyor belts or horizontal baffles can improve the stability of the conveyor belt's grip on the workpiece, prevent the workpiece from slipping and dropping, and ensure the accurate running track; The lifting and conveying takes up less space and has a good effect on small cylindrical parts.
In the PLC program design, if the workpiece to be processed has directivity, the edited PLC program should not only control the turning and positioning of the workpiece, but also consider the reliability of positioning. If the positioning is not correct for one time, it can be redirected for one or two times to ensure that the cycle will not stop due to accidental errors in workpiece conveying and positioning.
2. Manipulator reclaiming
When the workpiece is transported in place, the truss manipulator is responsible for sending the workpiece to be processed on the conveyor line to the machine tool, taking the finished workpiece out of the machine tool, and putting it back to the initial loading position of zui. Its actions are: claw opening and closing; Lifting movement; Move left and right. The opening and closing of the gripper is driven by the cylinder, and the lifting movement and left and right movement are driven by the servo motor respectively. In the process of grasping the workpiece, the position and angle relationship between the gripper and the workpiece must be guaranteed. Firstly, adjust the datum plane on the gripper to fit the corresponding datum plane on the table to reduce the angle error; Then, shift the gripper or material table to adjust the position error.

3. Chuck loading and unloading
Chuck loading and unloading of truss manipulator This is the core part of the entire automatic loading and unloading mechanism. In the process of loading and unloading the chuck, the manipulator shall work with some auxiliary functions of the machine tool, which shall be synchronized, coordinated, reliable and reliable. The relative position of the upper and lower material channels, storage devices and the working host determines the position and posture of the workpiece in space before and after feeding, which directly affects the coordinate form of the arm.
Truss manipulator
4. Manipulator feeding
After the chuck loading and unloading is completed, the truss manipulator must transport the processed workpieces to the feed chute. At this time, the feeding is prior to the reclaiming and chuck loading and unloading, and the reclaiming is prior to the chuck loading and unloading, so as to ensure that no grab with material will occur during the entire loading and unloading cycle.
Note: Loading and unloading is a complete cycle, which must start from the upper material waiting position, and can only be started after the completion of loading. After the completion of unloading, return to the loading waiting position, and prepare to execute the next loading and unloading cycle. In case of power failure or misoperation during the process, only the "reset" can be started again at the loading waiting position. Press "Emergency Stop" carefully.
5. The workpiece is transported to the next process
The truss manipulator sends the finished workpiece to the silo, and then sends the finished workpiece to the next production process through the conveyor belt.
The installation of truss manipulator can replace the robot conveying device, simplify the workpiece conveying process, make the production line more compact, promote the automatic program, and improve the labor productivity. Through practice, it is proved that the gantry truss manipulator has less changes to the mold from an economic point of view and for the manufacturer, which is economical, practical and relatively fast, and has received good social and economic benefits.

No. 3, Guangda Road, Zhitang Industrial Park, Changshu City