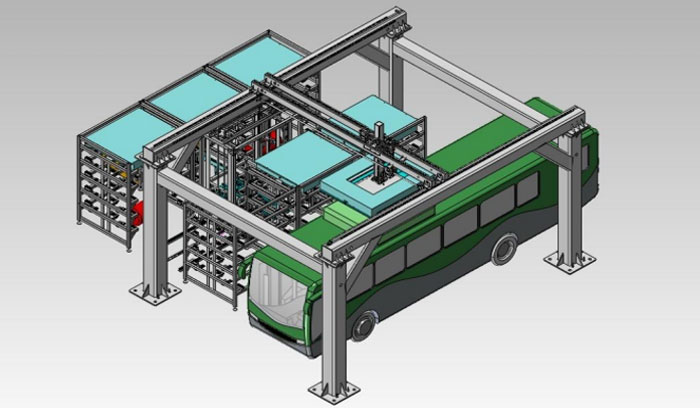
Robot system integration is a high-tech enterprise specializing in the R&D, production and sales of industrial robots. Its main products include: CNC loading and unloading manipulator, CNC manipulator, etc. The working principle of CNC machine tool manipulator is that the manipulator is mainly composed of three parts: actuator, drive mechanism and control system. CNC machine tool manipulator is mainly composed of four parts:
1. Manipulator body: It is made of high-strength column, gear rack and high-strength aluminum.
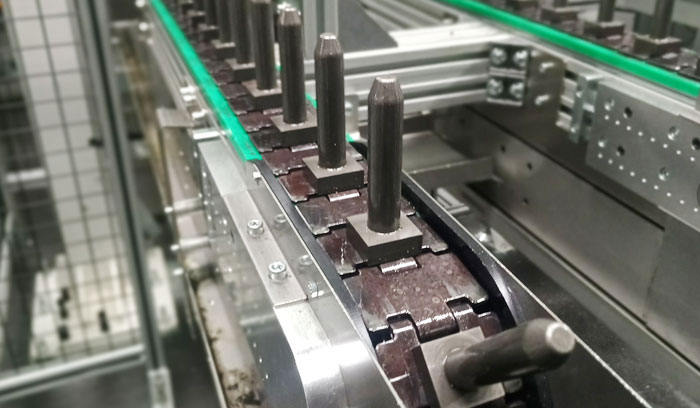
2. Manipulator end device: there are 180 degree rotating cylinders, pneumatic fingers, clamping fingers, etc. The end device includes pneumatic cylinders, pneumatic fingers and clamps. According to the clamping process requirements of CNC machine tools, appropriate end devices are configured to meet the requirements for rapid and accurate clamping of various shaft workpieces, circular workpieces and other special workpieces.

3. Manipulator control system: The robot teaching system is used to control the teaching machine, which is small in size and easy to install. It can realize manual online programming, path planning and simple operation. Bus type control is adopted, with simple wiring and convenient machine adjustment. The servo drive adopts the absolute value type, which can realize high-speed control with an accuracy of 0.02mm.
Silo of manipulator of automatic assembly line manufacturer: the feeding system adopts servo drive, linear guide rail support, reliable and stable operation, maintenance free, long life, and high precision. With the 360 ° rotary reclaiming claw, the workpiece can be taken and placed in situ, which doubles the storage capacity of the workpiece, improves the work efficiency, and reduces the labor intensity of workers.

No. 3, Guangda Road, Zhitang Industrial Park, Changshu City